 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g
设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g
设 R[t]为t的实系数多项式的集合,![设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],](https://img2.soutiyun.com/ask/2021-02-23/982943323474961.png) 为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g2(t).求f(R0[1]).f-1({t2+2t+1}).f-1(f({t-1,t2-1})).
为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g2(t).求f(R0[1]).f-1({t2+2t+1}).f-1(f({t-1,t2-1})).
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式…”相关的问题
更多“设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式…”相关的问题




 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.) .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能. 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.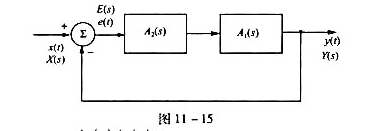
 ,属于SS的函数是
,属于SS的函数是 。
。 个划分块,作自然映射g:S→S/R,g(x)=[x]R,那么g的表达式是
个划分块,作自然映射g:S→S/R,g(x)=[x]R,那么g的表达式是 ,g(b)=
,g(b)= 。
。
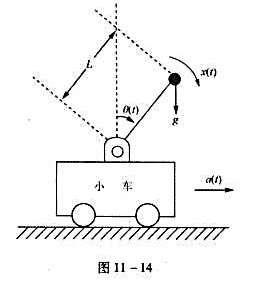
 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
 ,得到如下简化的线性方程
,得到如下简化的线性方程
 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
 。证明
。证明
 ;
; .
.















