题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
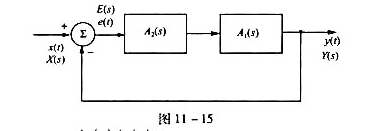
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A…”相关的问题
更多“在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A…”相关的问题

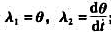
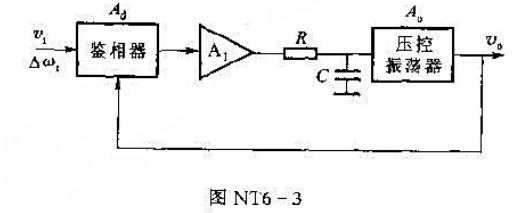
 以及F都为常数
以及F都为常数
 求极点的实部等于零的条件(产生自激振荡).讨论系统出现稳定、不稳定以及临界稳定的条件,在s平面示意绘出这三种情况下极点分布图.
求极点的实部等于零的条件(产生自激振荡).讨论系统出现稳定、不稳定以及临界稳定的条件,在s平面示意绘出这三种情况下极点分布图.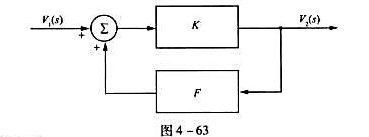
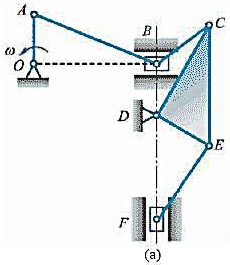
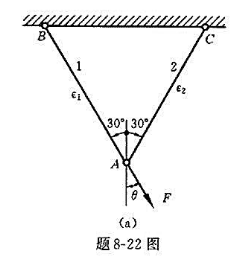
 ;ωOA=4rad/s。在图 9-8a所示位置时,曲柄OA与水平线OB垂直;且B,D和F在同1铅直线上,又DE垂直于EF求杆EF的角速度和点F的速度。
;ωOA=4rad/s。在图 9-8a所示位置时,曲柄OA与水平线OB垂直;且B,D和F在同1铅直线上,又DE垂直于EF求杆EF的角速度和点F的速度。