题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
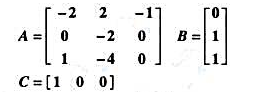
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
己知线性时不变系统状态方程的参数矩阵为
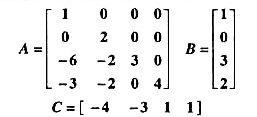
求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性与可观性;(3)系统函数H(s).
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化…”相关的问题
更多“己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化…”相关的问题


 ,求状态方程的零输入解;
,求状态方程的零输入解;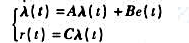
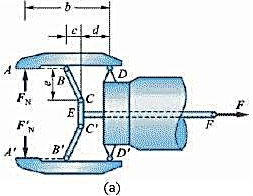


 和实际啮合线
和实际啮合线 ,并由图上量取
,并由图上量取