题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性
己知线性时不变系统状态方程的参数矩阵为
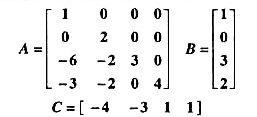
求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性与可观性;(3)系统函数H(s).
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
己知线性时不变系统状态方程的参数矩阵为
求:(1)将参数矩阵化为A对角线形式;(2)判断系统可控性与可观性;(3)系统函数H(s).
如果结果不匹配,请 联系老师 获取答案
 更多“己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化…”相关的问题
更多“己知线性时不变系统状态方程的参数矩阵为求:(1)将参数矩阵化…”相关的问题
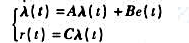
己知一离散系统的状态方程和输出方程表示为


(1)给定 ,求状态方程的零输入解;
,求状态方程的零输入解;
(2)求系统的差分方程表示式;
(3)给定(1)的起始条件,且给定x(n)=2n,n≥0.求输出响应y(n),并求(2)中差分方程的特解.
给定线性时不变系统的状态方程和输出方程
其中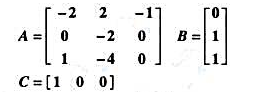
(1)检查该系统的可控性和可观性;(2)求系统的转移函数.
:
(1)建立该系统的状态方程,建议选状态变量
(2)利用A矩阵求特征矢量和特征值a1、a2;
(3)为使系统稳定,K1、K2应满足什么条件?(其结果应与习题11-11之答案相同.)
已知某线性时不变系统,f(t)为输入,y(t)为输出,系统的单位冲激响应 h(t)=e^−t·ξ(t)/2。若输入信号f(t)=e^−2t ξ(t) ,利用卷积积分求系统输出的零状态响应yf(t)。
求下列线性空间的一组基与维数.
1)pnxn中全体对称(反对称,上三角)矩阵对矩阵的加法,矩阵与数的乘法:
2)全体正实数R+={a∈Ra>o)加法与纯量积定义为

3)A∈Rnxn,C(A)为所有与
的可换的n阶方阵集,对矩阵的加法及矩阵与数的乘法:
4)
(1)两齿轮的模数m和基圆周节pb1、Pb2;
(2)两齿轮的变位系数x1、x2,且属何种传动类型;
(3)两齿轮的齿根圆半径rf1、rf2和齿顶圆半径ra1、ra2;
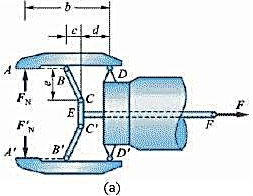
(4)按比例画出两齿轮啮合原理图,在图上标注出理论啮合线 和实际啮合线
和实际啮合线 ,并由图上量取长度,计算重合度ε;
,并由图上量取长度,计算重合度ε;
(5)判断齿轮是否有根切,为什么?
注:无侧隙啮合方程