题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
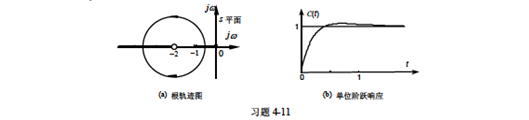
已知单 位反馈控制系统的闭环传递函数为试画出以ωo为常数、ξ为变数时,系统特征方程式的根
已知单 位反馈控制系统的闭环传递函数为
试画出以ωo为常数、ξ为变数时,系统特征方程式的根在s平面上的分布轨迹。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知单 位反馈控制系统的闭环传递函数为
试画出以ωo为常数、ξ为变数时,系统特征方程式的根在s平面上的分布轨迹。
如果结果不匹配,请 联系老师 获取答案
 更多“已知单 位反馈控制系统的闭环传递函数为试画出以ωo为常数、ξ…”相关的问题
更多“已知单 位反馈控制系统的闭环传递函数为试画出以ωo为常数、ξ…”相关的问题
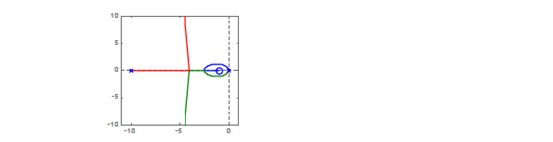
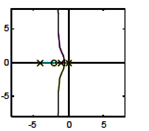
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
单位反馈控制系统,开环传递函数为

(1)试作根轨迹草图。
(2)确定系统闭环根全部为负实根时。增益r的取值范围。
A.无闭环零点控制系统
B.不稳定控制系统
C.三阶控制系统
D.稳定控制系统
E.以上都不是
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
设单位负反馈控制系统的开环传递函数为
试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和纯虚根的K*值。
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
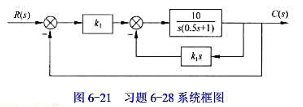
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
已知负反馈系统的开环传递函数为
(1)试画出T=0时,θ≤Kg≤∞的根轨迹;
(2)在(1)的根轨迹上,求出满足闭环极点阻尼比 的Kg值;
的Kg值;
(3)在(2)的K值下,画出0≤T≤∞的参量根轨迹;
(4)在(3)的根轨迹上,求出满足闭环极点为临界阻尼的T值。







 试选择KK及T值以满足下列指标:
试选择KK及T值以满足下列指标:
 ,则此系统是()。
,则此系统是()。