
 如果结果不匹配,请
如果结果不匹配,请 
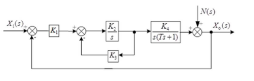
 更多“系统方框图如图所示,试确定扰动n(t)=t引起的稳态误差()…”相关的问题
更多“系统方框图如图所示,试确定扰动n(t)=t引起的稳态误差()…”相关的问题
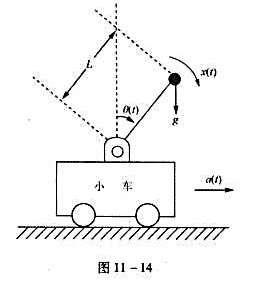
 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似: ,得到如下简化的线性方程
,得到如下简化的线性方程

(1)设x(t)为激励信号,θ(t)是响应信号,若小车不动,即a(t)=0,写出系统函数 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
(2)研究适当移动小车对稳定性的影响.假定随θ(t)之变化按比例反馈作用使小车产生加速度,即a(t)=Kθ(t),K为比例系数.画出引入反馈后的系统方框图,并求反馈系统的系统函数.讨论系统的稳定性(分为Kg三种情况).
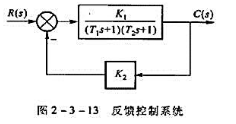
(3)改用比例-微分(PD)反馈控制,即

其中K1和K2都为正实系数.写出此反馈系统的系统函数,讨论为使系统稳定,K1,K2应满足何种约束条件?
采样系统如图所示,其中T为采样周期。
要求:
(1)计算系统开环及闭环脉冲传递函数。
(2)确定闭环系统稳定的K值范围。
(3)讨论采样周期T对系统稳定性的影响。

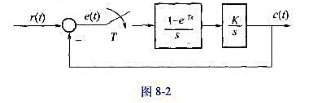
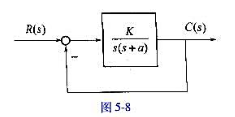
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。
设有方程组Ax=b,其中
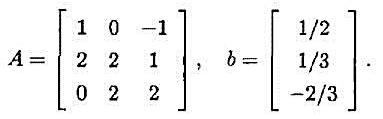
已知它有解x=(1/2,-1/3,0)T。如果右端有小扰动 ,试估计由此引起的解的相对误差。
,试估计由此引起的解的相对误差。
的值。
在某生产过程中,通过加热炉对冷物料加热。根据工艺要求,需对热物料出口温度进行严格控制。对系统分析发现,主要扰动为燃料压力波动。故设计如图所示的控制系统。要求: (1)这是一个什么类型的控制系统?画出控制系统框图。 (2)为保证设备安全,炉温不能过高。确定调节阀的气开、气关形式。 (3)确定两个调节器的正反作用。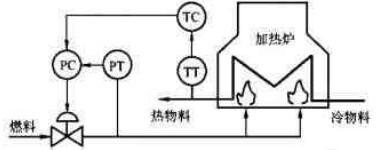
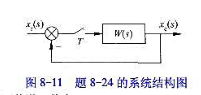
设图8-11所示采样系统的采样周期T=0.5s,而 ,试绘制此系统的根轨迹图,并确定系统稳定的临界增益K值。
,试绘制此系统的根轨迹图,并确定系统稳定的临界增益K值。
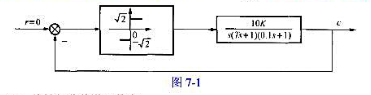
已知非线性系统如图7-1所示,其中,T>0,K>0, 现要求系统输入量c(t)的自振振幅Xc=0.1,角频率为ωc=10,试确定参数T和K的数值。
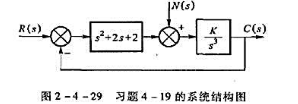
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
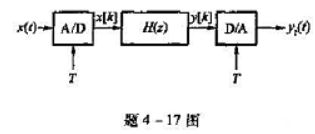
在实际中,可以通过题4-17图所示系统来实现一个模拟滤波器。
设要实现的模拟低通滤波器H(s)的指标为

(1)如果系统的抽样频率f=8kHz,试确定图中数字滤波器H(z)的设计指标,使得如图所示系统能和模拟低通滤波器H(s)等价。
(2)用双线性变换法,分别设计满足(1)中指标的BW型和CB I型的数字低通滤波器。