
 如果结果不匹配,请
如果结果不匹配,请 
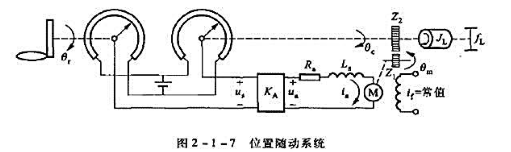
 更多“位置随动系统的原理图如图2-1-7所示。试说明系统的工作原理…”相关的问题
更多“位置随动系统的原理图如图2-1-7所示。试说明系统的工作原理…”相关的问题
第1题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
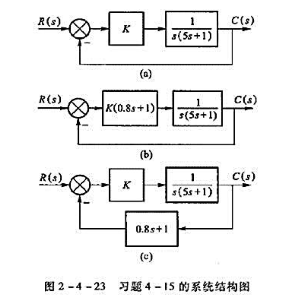
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第3题
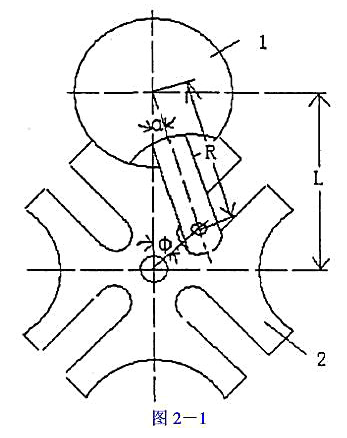
如图2-1所示为外槽轮机构在运动过程中的任一位置,设拨盘1的位置用角度a来确定,而槽轮2的位置用
如图2-1所示为外槽轮机构在运动过程中的任一位置,设拨盘1的位置用角度a来确定,而槽轮2的位置用角度 来确定.圆销的回转半径为R,中心距离为L,拨盘以等速
来确定.圆销的回转半径为R,中心距离为L,拨盘以等速 1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度
1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度 2.
2.
第8题
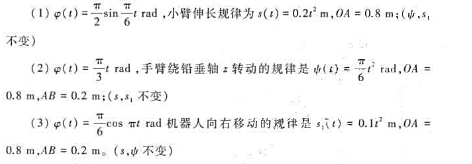
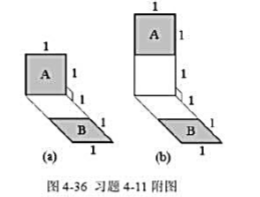
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
点击查看答案
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。