 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
若方程(x﹣5)2=19的两根为a和b,且a>b,则下列结论中正确的是()
A.是19的算术平方根
B.是19的平方根
C.﹣5是19的算术平方根
D.+5是19的平方根
 答案
答案
C、﹣5是19的算术平方根
 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.是19的算术平方根
B.是19的平方根
C.﹣5是19的算术平方根
D.+5是19的平方根
答案
C、﹣5是19的算术平方根
如果结果不匹配,请 联系老师 获取答案
 更多“若方程(x﹣5)2=19的两根为a和b,且a>b,则下列结论…”相关的问题
更多“若方程(x﹣5)2=19的两根为a和b,且a>b,则下列结论…”相关的问题
平面简诸波的波动方程
(1)ϕ表什么? (2)2πx/λ表示什么? (3) ϕ-2πx/λ表示什么?(4)若把波动方程改写为y 表示什么?
表示什么?
考虑方程dy/dx+p(x)y=q(x),其中p(x)和q(x)都是以ω>0为周期的连续函数。
试证:(1)若q(x)=0,则方程的任一非零解以ω>0为周期 p(x)的平均值
p(x)的平均值
(2)若q(x)≠0,则方程的有唯一的ω周期解 试求出此解。
试求出此解。
若简谐运动方程为 ,式中x的单位为m,t的单位为s求:(1)振幅、频率、角频率、周期和初相;(2)t=2s时的位移、速度和加速度。
,式中x的单位为m,t的单位为s求:(1)振幅、频率、角频率、周期和初相;(2)t=2s时的位移、速度和加速度。
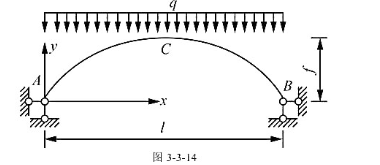
图3-3-14所示两铰拱,已知其拱轴线方程为y=(4f/2)x(1-x).在图中均布荷载作用下,若忽略轴向变形,则拱顶截面C的弯矩MC=();若考虑轴向变形,则弯矩MC的受拉侧为侧(均不计剪切变形的影响).
n阶线性定常系统的状态方程和输出方程为:
 若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?
若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
用列举法表示下列各集合.
(1) {x|x是方程2x2+3x-2=0的根}。
(2) {x|x是方程x2-2x+5=0的实根).
(3) {x|x 是完全数5≤x≤10}.
(4) {x|x是整数x2=3}.
(5) {x|x是空集}.
A.1.14
B.1.25()
C.1.47
D.1.65

















