
 如果结果不匹配,请
如果结果不匹配,请 
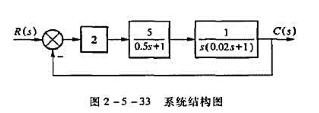
 更多“如图2-5-34所示为一小功率随动系统的动态结构图,试用两种…”相关的问题
更多“如图2-5-34所示为一小功率随动系统的动态结构图,试用两种…”相关的问题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
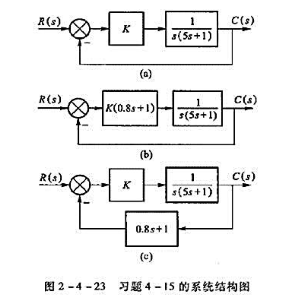
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
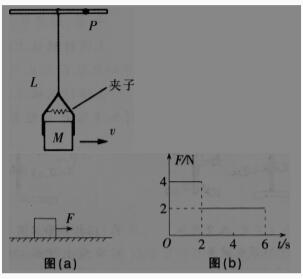
A.拉力在前2S内和后4s内做的功之比为1:1
B.拉力在前2s内和后4s内做的功之比为1:3
C.拉力在4s末和6S末做的功的功率之比为2:3
D.拉力在前2s内和后4S内做的功的功率之比为1:1
序列,已知发送滤波器的传输函数为
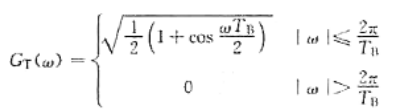
信道传输函数C(w)=1, n(t)是双边功率谱密度为m/2(W/Hz)的高斯白噪声。
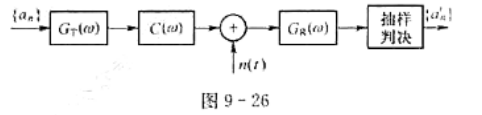
(1)若要使该系统最佳化,试问Gr(w)应如何选择?
(2)该系统无码间干扰的最高码元传输速率为多少?
(3)若发送的二进制基带信号为双极性信号,接收信号码元能量为E.并且P(0) = P(1) .试推导该系统的最佳判决限和最小误码率。
单位反馈小功率随动系统的开环传递函数为 ,试设计-一个无源校正网络,使系统的相位裕度不小于45%,穿越频率不低于50rads,并要求该系统在速度输入信号为100rad/s作用下,其稳态误差为0.5rad.
,试设计-一个无源校正网络,使系统的相位裕度不小于45%,穿越频率不低于50rads,并要求该系统在速度输入信号为100rad/s作用下,其稳态误差为0.5rad.
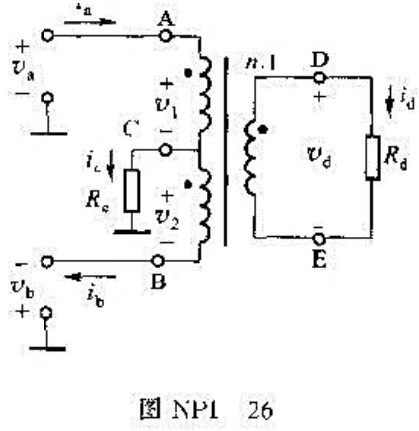
已知如图2-2所示电路中负载所需最大功率为16W,负载电阻为8Ω ,(1)求电源电压至少应为多少伏?(2)该电路的工作原理?

反相功率输入时PC=0.Pd=2(VdIfo);(2)若i1=-iL,vp=-v3,即相同功率输入时,Pd=0,Pp=2(VdIf);(3)隔离条件为Rc=n²Rd。设变压器为理想的。
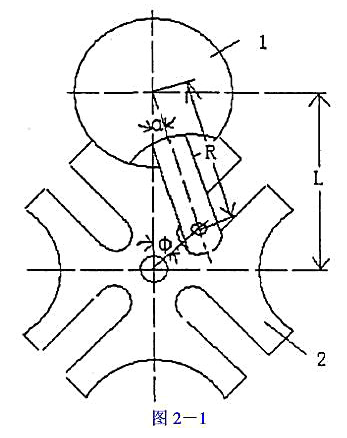
如图2-1所示为外槽轮机构在运动过程中的任一位置,设拨盘1的位置用角度a来确定,而槽轮2的位置用角度 来确定.圆销的回转半径为R,中心距离为L,拨盘以等速
来确定.圆销的回转半径为R,中心距离为L,拨盘以等速 1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度
1=d /dt=常数)转动,试用解析法求槽轮的角速度2及角加速度 2.
2.