
 如果结果不匹配,请
如果结果不匹配,请 
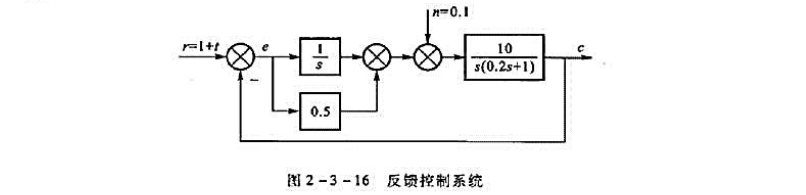
 更多“系统如图2-3-16所示。试判别系统闭环稳定性,并确定系统的…”相关的问题
更多“系统如图2-3-16所示。试判别系统闭环稳定性,并确定系统的…”相关的问题
第1题
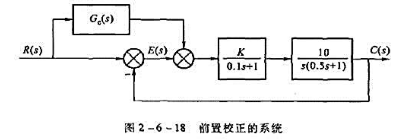
系统如图2-6-18所示,要求闭环回路部分的阶跃响应无超调,并且整个系统(C(5)对R(5))具有二阶无
系统如图2-6-18所示,要求闭环回路部分的阶跃响应无超调,并且整个系统(C(5)对R(5))具有二阶无差度。试确定K值及前置校正Gc(s)
第2题
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:(1)速度稳态误差系数
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
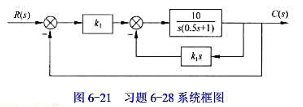
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
第3题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
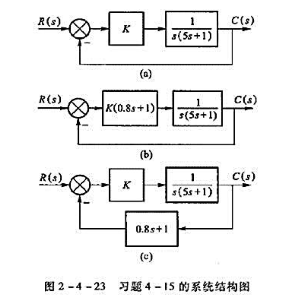
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第5题
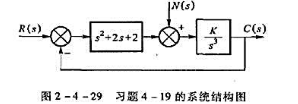
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
第7题
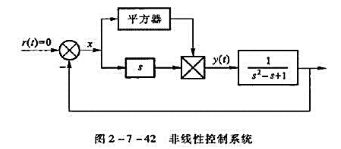
非线性系统如图2-7-42所示,计算图中由x到y的非线性网络的描述函数,并用主教材式(7-91)求出图
非线性系统如图2-7-42所示,计算图中由x到y的非线性网络的描述函数,并用主教材式(7-91)求出图示非线性系统的周期运动的参数,用主教材式(7-93)判别周期运动的稳定性