题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
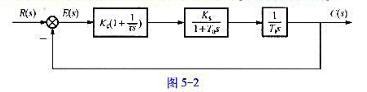
控制系统结构如图5-2所示,其中为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲
控制系统结构如图5-2所示,其中 为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
控制系统结构如图5-2所示,其中为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
如果结果不匹配,请 联系老师 获取答案
 更多“控制系统结构如图5-2所示,其中为大于0的已知参数,且τ>T…”相关的问题
更多“控制系统结构如图5-2所示,其中为大于0的已知参数,且τ>T…”相关的问题
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
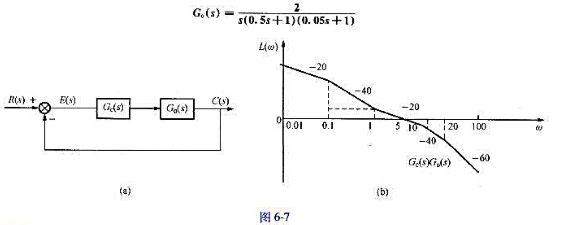
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
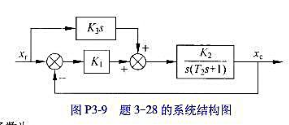
一复合控制系统的结构图如图P3-9所示,其中 。试求:
。试求:
(1)输入量分别为 时系统的稳态误差;
时系统的稳态误差;
(2)系统的单位阶跃响应及其σ%,tt
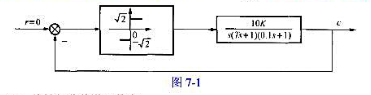
已知非线性系统如图7-1所示,其中,T>0,K>0, 现要求系统输入量c(t)的自振振幅Xc=0.1,角频率为ωc=10,试确定参数T和K的数值。
控制系统如图4-29所示,其中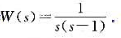
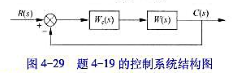
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
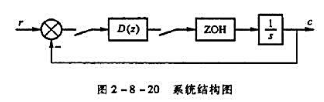
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
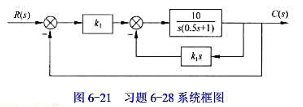
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
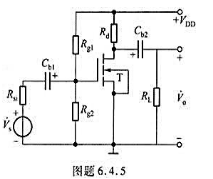
电路如图题6.4.5所示,其中VDD=5V,Rsi=2千欧,Rg1=60千欧,Rg2=40千欧,Rd=RL=5.1 千欧,MOS管参数为Kn=0.8mA/V2,VTN=1V,λ=0,Cgn=1pF,Cgd=0.4pF。试求该电路的中频源电压增益ArSM和源电压增益的上限频率fH。
某可控硅控制线路中,流过负载R的电流i(t)如图6-21所示,即
其中l0称为触发时间,如果T=0.02(s)(即ω= =100π)
=100π)
(1)当触发时间t0=0.0025(s)时,求0≤t≤ 内电流的平均值;
内电流的平均值;
(2)当触发时间为t0时,求[0,]内电流的平均值;
(3)要使i平均= (A)和
(A)和 (A),问相应的触发时间应为多少?
(A),问相应的触发时间应为多少?
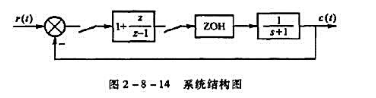
已知系统的结构如图2-8-14所示,试求当r(t)=1(t),r(t)=5t,1(t)和r(t)=1/2t2·1(t)时,系统的稳 态误差,其中采样周期为1a。