题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
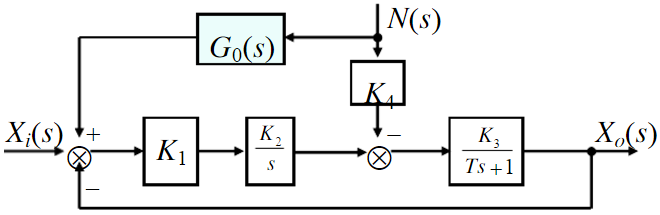
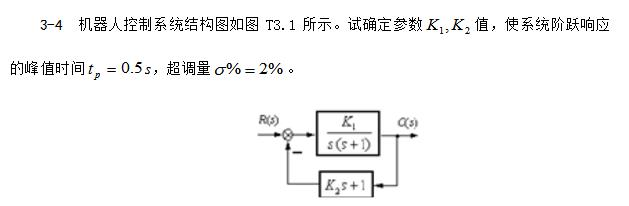
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
如果结果不匹配,请 联系老师 获取答案
 更多“机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶…”相关的问题
更多“机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶…”相关的问题
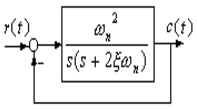
系统结构如图所示,当输入r(t)=2sint时,测得稳态输出为c(t)=4sin(t-45°)。试确定参数ζ和ωn。
某控制系统用临界比例度法整定参数,已知δK=25%,TK=5min。请分别确定PI,PID作用时的控制器参数。
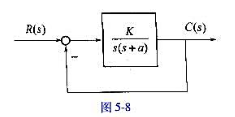
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。
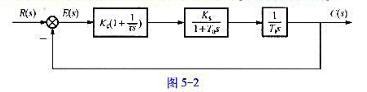
控制系统结构如图5-2所示,其中 为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
为大于0的已知参数,且τ>T0.试画出系统的大致开环幅相特性曲线,并推导使系统具有最大相焦裕虽的ω值及kt值。
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
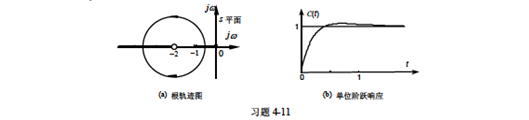
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
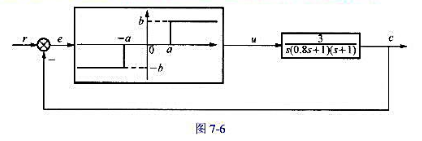
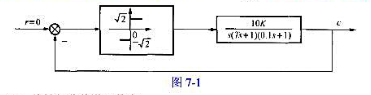
已知非线性系统如图7-1所示,其中,T>0,K>0, 现要求系统输入量c(t)的自振振幅Xc=0.1,角频率为ωc=10,试确定参数T和K的数值。
控制系统方框图如图所示,试求在输入xi(t)和扰动n(t)作用下的传递函数Xo(s)/Xi(s)和Xo(s)/N(s)。