 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
()是空间上的标准直角坐标系,它被固定在机器人事先确定的位置,可定义机器人单元。
A.手动坐标系
B.世界坐标系
C.关节坐标系
D.用户坐标系
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.手动坐标系
B.世界坐标系
C.关节坐标系
D.用户坐标系
如果结果不匹配,请 联系老师 获取答案
 更多“()是空间上的标准直角坐标系,它被固定在机器人事先确定的位置…”相关的问题
更多“()是空间上的标准直角坐标系,它被固定在机器人事先确定的位置…”相关的问题
A.用竹芭板脚手板时,小横杆两端用直角扣件固定在立杆上
B.用竹串片脚手板时,小横杆两端用直角扣件固定在大横杆上
C.小横杆靠墙侧外伸长度不得大于0.4L,也不得大于500mm
D.单排脚手架,小横杆靠侧伸入墙内长度不得小于120mm
设在空间直角坐标系0xyz的原点0(0,0,0)处放置有单位正电荷,而另有单位负电荷在椭圆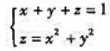 [平面与旋转抛物面的交线]
[平面与旋转抛物面的交线]
上移动.问:当两电荷各自移动到什么位置时,两者引力最大?又各自移动到什么位置时,两者引力最小?
A.纵向扫地杆距底座上皮不大于200mm,用直角扣件与立杆固定
B.立杆基础必须坚实平整、排水畅通,具有足够承载力,防止不均匀沉降
C.横向扫地杆应用直角扣件固定在紧靠纵向扫地杆下方的立杆上
D.脚手架的搭设高度
E.立杆底座下设置木垫板厚度应不小于50mm,且应设纵向、横向扫地杆

















