

 如果结果不匹配,请
如果结果不匹配,请 
 更多“平面机构中若引入一个高副,将带入()约束。”相关的问题
更多“平面机构中若引入一个高副,将带入()约束。”相关的问题
第1题
虚约束发生的场合”重复移动副“是指()
A、两个构件间构成多个移动副,其导路互相平行
点击查看答案
B、在机构的运动过程中,如两个构件上某两点之间的距离始终保持不变,在这种情况下,若用一个构件将该两点用转动副连接起来,则该构件及形成的个两转动副所引入的约束为虚约束
C、机构中某些不影响机构运动传递的重复部分所引入的约束
D、两个构件间构成多个转动副,其轴线相互重合时,只有一个转动副起作用,其它副均为虚约束
第2题
计算图示机构的自由度,若有复合铰链、局部自由度、虚约束,必需注明。试判断下列哪个分析是错误的。()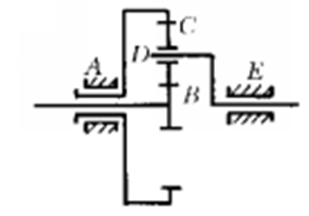
A.机构中的活动构件数n = 4
B.机构中A处为复合铰链,而无局部自由度,pl = 4,ph=2 ,F '=0
C.D处齿轮被B和C处两高副约束,右侧两副杆连接所引入约束为虚约束,p '=1
D.机构自由度计算结果应为F = 2
第11题
上海—50型拖拉机变速箱为()式变速箱,它由一个具有()前进档和()倒退档的普通()主变速箱与一个高
上海—50型拖拉机变速箱为()式变速箱,它由一个具有()前进档和()倒退档的普通()主变速箱与一个高
点击查看答案
低档()减速机构的副变速箱组合而成。用()操纵手柄操纵,可获得()前进档和()倒退档。
















