 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设主串t和模式串p分别是由d(d≥2)元字符集中随机字符组成的长度为n和m的字符串.试证明简单子串
设主串t和模式串p分别是由d(d≥2)元字符集 中随机字符组成的长度为n和m的字符串.试证明简单子串搜索算法所做比较次数的期望值为
中随机字符组成的长度为n和m的字符串.试证明简单子串搜索算法所做比较次数的期望值为

由此可见,对于随机选取的字符串,简单子串搜索算法还是十分有效的.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设主串t和模式串p分别是由d(d≥2)元字符集中随机字符组成的长度为n和m的字符串.试证明简单子串搜索算法所做比较次数的期望值为
由此可见,对于随机选取的字符串,简单子串搜索算法还是十分有效的.
如果结果不匹配,请 联系老师 获取答案
 更多“设主串t和模式串p分别是由d(d≥2)元字符集中随机字符组成…”相关的问题
更多“设主串t和模式串p分别是由d(d≥2)元字符集中随机字符组成…”相关的问题
在模式枚举(pattern enumeration)类应用中,需要从主串T中找出所有的模式串P(T|=n,|P|=m),而且有时允许模式串的两次出现位置之间相距不足m个字符。
类似于教材310页图11.3中的实例,比如在“000000”中查找“000”。若限制多次出现的模式串之间至少相距|P|=3个字符,则应找到2处匹配;反之,若不作限制,则将找到4处匹配。
a)试举例说明,若采用后一约定,则教材11.4.3节BM算法的好后缀策略,可能需要Ω(nm)时间;
b)试针对这一缺陷改进好后缀策略,使之即便在采用后一约定时,最坏情况下也只需线性时间。
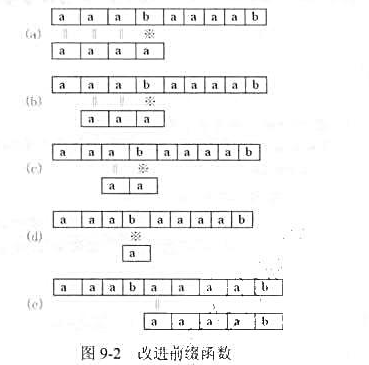
在图9-2(a)中匹配失败后,按前缀函数指示继续作了图(b)~(d)的比较后,最后在图(e)找到一个匹配.事实上,图(b)~(d)的比较都是多余的.因为模式串在位置0、1、2处的字符和位置3处的字符都相等,因此不需要再和主串中位置3处的字符比较,而可以将模式一次向右滑动4个字符,直接进入图(e)的比较.这就是说,在KMP算法中遇到p[j+1]≠t[i],且p[j+1]=p[next[j]+1]时,可一次向右滑动j-next[next[j]]个字符,而不是j-next[j]个字符.根据此观察,设计一个改进的前缀函数,使得遇到上述特殊情况时效率更高.
变化规律是;当单位时间收入T大于支出S时(见7.1节(9)式)E增加,T小于S时E减少,E的变化串与T-s成正比。
(1)建立关于E(t)的方程,求x(t),E(t)的平衡点并讨论其稳定性。
(2)将所得结果与7.1节的效益榄型和捕捞过度模型进行比较。
定:
(1)该序列的功率谱密度及功率;
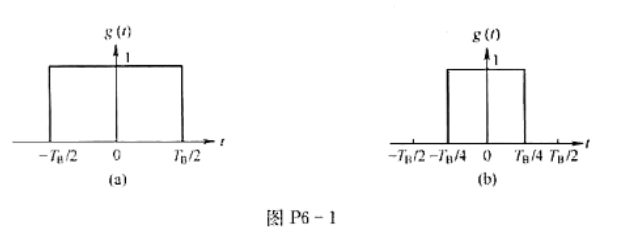
(2)若g(t)为如图P6-1(a)所示波形,Ts为码元宽度,则该序列是否存在频率为FB=1/Tb的离散分量?
(3)若g(t)改为图P6-I(b),重新回答(2)。
设x,y和z是3个串,且满足x z和yz.试证明:
z和yz.试证明:
(1)若|x|≤y|,则xy.
(2)若|x|≥|y|,则yx.
(3)若|x|=|y|,则xy.
A.前馈-反馈控制系统相对于串级控制系统,反应速度更快、更稳定
B.前馈-反馈控制系统能克服多种干扰,是由于串级控制系统的高级系统
C.前馈-反馈控制系统是由一个反馈回路和另一个开环的补偿回路叠加而成
D.前馈-反馈控制系统是一种基于模型的控制控制系统,可实现性不纯在问题
E.串级控制系统是由内、外(或主、副)两个反馈回路所组成

















