如果结果不匹配,请
如果结果不匹配,请 
 更多“求微分方程x(t)+ x(t)=8(1),(-∞<1<+∞)…”相关的问题
更多“求微分方程x(t)+ x(t)=8(1),(-∞<1<+∞)…”相关的问题
设函数f(x)在[1,+∞]上连续、若由曲线y=f(x)与直线x=1,x=t(t>1)及Ox轴围成平面图形绕Ox轴旋转一周所成的旋转体的体积为

试求y=f(x)所满足的微分方程,并求该微分方程满足条件y(1)=2的解.
求解如下具有混沌状态的时滞微分方程 已知在t≤0时,x(1)=0.5,试求该方程在[0,200]的相位图。
已知在t≤0时,x(1)=0.5,试求该方程在[0,200]的相位图。
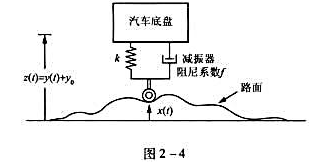
位置.缦冲器等效为弹簧与减震器并联组成,刚度系数和阻尼系数分别为k和f.由于路面的凹凸不平[表示为x(t)的起伏]通过缓冲器间接作用到汽车底盘,使汽车振动减弱.求汽车底盘的位移量y(t)和路面不平度x(t)之间的微分方程.
 给定初始条件x(t0)=x0,(to)=x,则可以编写函数描述该隐式微分方程,然后调用命令
给定初始条件x(t0)=x0,(to)=x,则可以编写函数描述该隐式微分方程,然后调用命令 就可以求解该隐式微分方程。其中,fun为Matlab函数描述隐式微分方程,[t0,tn]为微分方程的求解区间;x0为x(t0)的初始值,xp0为&(t)的初始值。但是隐式微分方程不同于-般的显式微分方程,求解之前,除了给定x(1)的初始值,还需要i(1)的初始值,xi(1)的初始值不能任意赋值,必须满足微分方程的相容性条件,否则将可能出现矛盾的初始值。通常使用函数decic求出这些未完全定义的初值条件,函数decie的使用格式为
就可以求解该隐式微分方程。其中,fun为Matlab函数描述隐式微分方程,[t0,tn]为微分方程的求解区间;x0为x(t0)的初始值,xp0为&(t)的初始值。但是隐式微分方程不同于-般的显式微分方程,求解之前,除了给定x(1)的初始值,还需要i(1)的初始值,xi(1)的初始值不能任意赋值,必须满足微分方程的相容性条件,否则将可能出现矛盾的初始值。通常使用函数decic求出这些未完全定义的初值条件,函数decie的使用格式为 其中x0是给定的x(t)的初始值,xp0是任意给定的x(1)的初始值,fixed_:x0和fixed_xp0是与xp0同维数的列向量,其分量为1表示需要保留的初值,为0表示需要求解的初始值。若fixed_x0和fixed_xp0等于空矩阵[],表示允许所有的初值分量可以发生变化。分别用显式和隐式解法求下列微分方程的数值解
其中x0是给定的x(t)的初始值,xp0是任意给定的x(1)的初始值,fixed_:x0和fixed_xp0是与xp0同维数的列向量,其分量为1表示需要保留的初值,为0表示需要求解的初始值。若fixed_x0和fixed_xp0等于空矩阵[],表示允许所有的初值分量可以发生变化。分别用显式和隐式解法求下列微分方程的数值解

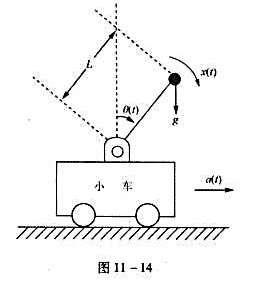
 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似: ,得到如下简化的线性方程
,得到如下简化的线性方程

(1)设x(t)为激励信号,θ(t)是响应信号,若小车不动,即a(t)=0,写出系统函数 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.
(2)研究适当移动小车对稳定性的影响.假定随θ(t)之变化按比例反馈作用使小车产生加速度,即a(t)=Kθ(t),K为比例系数.画出引入反馈后的系统方框图,并求反馈系统的系统函数.讨论系统的稳定性(分为Kg三种情况).
(3)改用比例-微分(PD)反馈控制,即

其中K1和K2都为正实系数.写出此反馈系统的系统函数,讨论为使系统稳定,K1,K2应满足何种约束条件?
(1)求曲线 在点(x(t),y(t))处的切线L(t)的方程;
在点(x(t),y(t))处的切线L(t)的方程;
(2)证明L(t)在坐标轴上的截距平方和等于a2.
若简谐运动方程为 ,式中x的单位为m,t的单位为s求:(1)振幅、频率、角频率、周期和初相;(2)t=2s时的位移、速度和加速度。
,式中x的单位为m,t的单位为s求:(1)振幅、频率、角频率、周期和初相;(2)t=2s时的位移、速度和加速度。
设z=f(u),方程 确定u是x,y的函数,其中.f(u),φ(u)可微,P(t),φ'(u)连续,且φ'(u)=1,求
确定u是x,y的函数,其中.f(u),φ(u)可微,P(t),φ'(u)连续,且φ'(u)=1,求