如果结果不匹配,请
如果结果不匹配,请 
 更多“地形图每一幅图的各边均应测出图廓线()。”相关的问题
更多“地形图每一幅图的各边均应测出图廓线()。”相关的问题
第1题
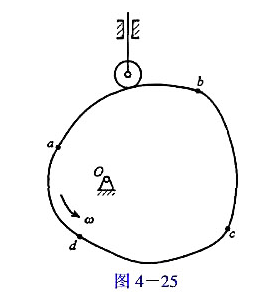
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0</sub>表示,行
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.

第6题
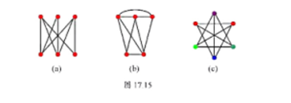
具有n个顶点且每一对不同的顶点之间都有一条边的无向图被称为()。
具有n个顶点且每一对不同的顶点之间都有一条边的无向图被称为()。
点击查看答案
A、无向完全图
B、无向连通图
C、无向强连通图
D、无向树图
第7题
Joseph Kruskal于1956年提出了构造极小支撑树的另一算法:将每个顶点视作一棵树,并将所有边按权
Joseph Kruskal于1956年提出了构造极小支撑树的另一算法:
将每个顶点视作一棵树,并将所有边按权重非降排序;
依次考查各边,只要其端点分属不同的树,则引入该边,并将端点所分别归属的树合二为一;
如此迭代,直至累计已引入n-1条边时,即得到一棵极小支撑树。
试证明:
a)算法过程中所引入的每一条边,都是某一割的极短跨越边(因此亦必属于某棵极小支撑树);
b)算法过程中的任一时刻,由已引入的边所构成的森林,必是某棵极小支撑树的子图;