题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
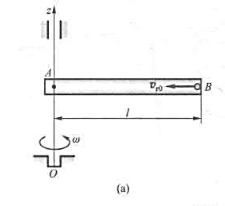
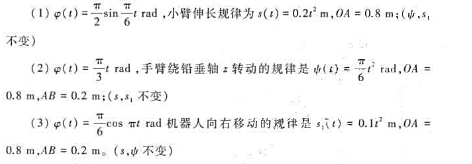
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
如果结果不匹配,请 联系老师 获取答案
 更多“如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι…”相关的问题
更多“如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι…”相关的问题

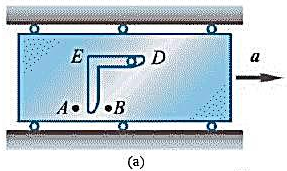
(1)若板的加速度a=2g(g为重力加速度),求螺栓A或B及铰D给予弯杆的力;
(2)若弯杆在A,B处均不受力,求板的加速度a及铰D给与弯杆的力。
质量为m,长为2l的均质杆OA绕水平固定轴O在铅垂面内转动,如题9-12图(a)所示。已知在图示位置杆的角速度为角加速度为a。试求此时杆在O轴的约束力。

题11-36图(a)所示系统位于铅垂面内。已知质量为m的偏心轮以匀角速度w绕O转动,偏心轮质心为C,偏心距OC= e,AB=BD,BO=OD。试求当轮转过φ角时,B处的动约束力。

图6-16所示公园游戏车M固结在长为R的臂杆OM上,臂杆OM绕铅垂轴 以恒定的角速度φ=ω转动,小车M的高度
以恒定的角速度φ=ω转动,小车M的高度 与转角φ的关系为
与转角φ的关系为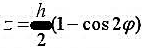 。求
。求 时,小车M在球坐标系的各速度分量:vr,vθ,vφ。
时,小车M在球坐标系的各速度分量:vr,vθ,vφ。
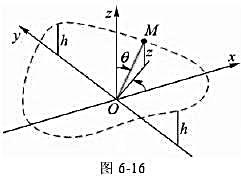
两根均质杆AC和BC质量均为m,长为l,在C处光滑铰接,置于光滑水平面上,如题12-22图(a)所示。设两杆轴线始终在铅垂面内,初始静止,C点高度为h,试求铰C到达地面时的速度。







 指向固定端A。问
指向固定端A。问 应为多少,小球恰能达到A端。
应为多少,小球恰能达到A端。