 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量Mp<20%,确定前向增益值K。(2)设计
控制系统如题图所示,试作复合校正设计,使得

(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
控制系统如题图所示,试作复合校正设计,使得
(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。
如果结果不匹配,请 联系老师 获取答案
 更多“控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量…”相关的问题
更多“控制系统如题图所示,试作复合校正设计,使得(1)系统的超调量…”相关的问题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
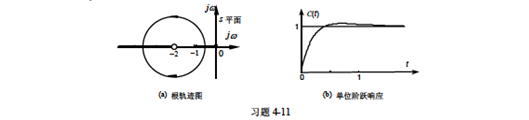
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
设采用了非线性反馈的某控制系统结构图如题图所示,试采用等倾线法绘制输入信号为r(t)=R.1(t)时系统的相轨迹图。

设控制系统的结构阳如题图(a)、(b)所示。图(a)中K5为速度反馈系数,试绘制以K5为参变量的根轨连图。图(b)中T功微分时间常数,试绘制以T为参变量的根轨迹图。

已知带有比例一积分调节器的控制系统其结构图如题图所示,图中,参数 为定值,且r>Ta。试证明该系统的相位裕度ye有极大值ycmax,井计算当相位裕度ye为最大值ycmax时,系统的开环截止频率
为定值,且r>Ta。试证明该系统的相位裕度ye有极大值ycmax,井计算当相位裕度ye为最大值ycmax时,系统的开环截止频率 和增益Ke的值。
和增益Ke的值。

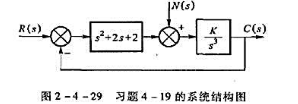
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
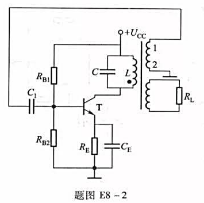
变压器反馈式振荡电路如题图E8-2所示。已知电路总电感L=10mH, C=0.01μF。
(1)在图中变压器的二次绕组上标明同名端,使反馈信号的相移满足电路振荡的相位条件;
(2)试估算电路的振荡频率f0。
原系统如图2-6-11中实线所示,其中K1=440,T1=0.025 。欲加反馈校正(如图中虚线所示),使系统的相对稳定裕度γ=50°,试求的K1,T2的值。
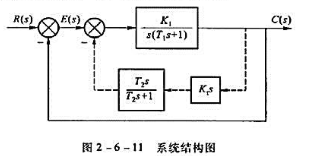







 的频示宽度增加一倍再作校正设计,试设计局部闭环结构。
的频示宽度增加一倍再作校正设计,试设计局部闭环结构。












