如果结果不匹配,请
如果结果不匹配,请 
 更多“转向传动机构角传动比和转向系统力传动比怎样定义?”相关的问题
更多“转向传动机构角传动比和转向系统力传动比怎样定义?”相关的问题
第2题
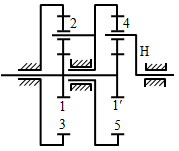
A.z2= 40,i1H= 49/24,系杆H与齿轮1转向相同
B.z2= 30,i1H= -49/24,系杆H与齿轮1转向相反
C.z2= 40,i1H= -49/24,系杆H与齿轮1转向相反
D.z2= 30,i1H= 49/24,系杆H与齿轮1转向相同
第3题
下面关于蜗杆传动的说法,正确的有()。
A.常用在传递功率不大但传动比较大的机构中
B.通常以蜗轮为主动件
C.轴线在空间成直角交叉
D.用左手定则确定蜗轮的转向
E.传动比等于蜗杆齿数与蜗轮齿数之比
第5题
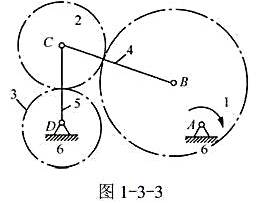
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。 (1)求该机构的
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。
(1)求该机构的自由度(要求有具体计算过程);
(2)用瞬心法求机构在图示位置时的传动比 (列出计算表达方式即可);
(列出计算表达方式即可);
(3)针对图示机构位置,直接在图上将机构中的高副化为低副;
(4)另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
第8题
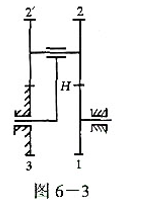
图6-3所示轮系中,已知各轮齿数z1=z´2=100,z2=99,z3=101.传动比,并说明构
图6-3所示轮系中,已知各轮齿数z1=z´2=100,z2=99,z3=101.传动比 ,并说明构件1与构件H的转向关系.
,并说明构件1与构件H的转向关系.