 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点l)确定线段P1P2
设 为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
l)确定线段P1P2的中点坐标:
2)若P1,P2,P3不共线,试证△P1P2P3的重心的坐标为
(注:设Pi(xi,yi,zi),i=1,2....n.则由坐标

所确定的点P称为Pi(1≤i≤n)的重心.)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
l)确定线段P1P2的中点坐标:
2)若P1,P2,P3不共线,试证△P1P2P3的重心的坐标为
(注:设Pi(xi,yi,zi),i=1,2....n.则由坐标
所确定的点P称为Pi(1≤i≤n)的重心.)
如果结果不匹配,请 联系老师 获取答案
 更多“设为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)…”相关的问题
更多“设为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)…”相关的问题
考虑简单回归模型
令z为x的二值工具变量。运用式(15.10),ⅣV估计量,可以写成: 其中,
其中, 是zi=0的那部分样本中yi和xi的样本平均值,而
是zi=0的那部分样本中yi和xi的样本平均值,而 是zi=1的那部分样本中yi和xi的样本平均值。该估计量称为群组估计量, 它是由沃尔德(Wald, 1940) 最先提出。
是zi=1的那部分样本中yi和xi的样本平均值。该估计量称为群组估计量, 它是由沃尔德(Wald, 1940) 最先提出。
设在空间直角坐标系0xyz的原点0(0,0,0)处放置有单位正电荷,而另有单位负电荷在椭圆 [平面与旋转抛物面的交线]
[平面与旋转抛物面的交线]
上移动.问:当两电荷各自移动到什么位置时,两者引力最大?又各自移动到什么位置时,两者引力最小?
证明:如果用最小二乘法使条直线拟合数据表 ,那么这条直线必通过点
,那么这条直线必通过点 ,这里x*和y*分别是xi和yi的平均值。
,这里x*和y*分别是xi和yi的平均值。
(i)令β0,和β1为yi对xi进行回归的截距和斜率(有n次观测);c1和c2为常数且 对c2xi,进行回归的截距和斜率。证明
对c2xi,进行回归的截距和斜率。证明 从而验证了2.4节中关于度量单位的命题。
从而验证了2.4节中关于度量单位的命题。
(ii)现在令 得自(c1+yi))对(c2+xi)的回归(对c1和c2不加任何限制)。
得自(c1+yi))对(c2+xi)的回归(对c1和c2不加任何限制)。
证明: 。
。
(iii)令 回归的OLS估计值,其中我们必须假定对所有i,都有yi>0。对c1>0,
回归的OLS估计值,其中我们必须假定对所有i,都有yi>0。对c1>0,
(iv)现在假定对所有i,都有x>0。令 回归的截距和斜率。
回归的截距和斜率。 回归的截距和斜率相比如何?
回归的截距和斜率相比如何?
(x)=x2或g(x)=log(1+x2) 。定义zi=g(xi)定义一个斜率估计量为
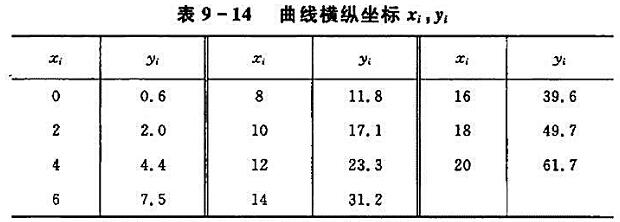
(1)利用多项式回归分析求这段曲线的纵坐标Y关于横坐标X的回归方程 ;
;
(2)设X1=X,X2=X2,利用多元线性回归方程求Y关于X1,X2的二元线性回归方程 ,从而得到这段曲线的回归方程。
,从而得到这段曲线的回归方程。
A.气氛(fēn)跫(qióng)音俪迤(yǐ)造诣(yì)
B.毗(pí)邻溯(shuò)流绣闼(tà)咫(zhí)尺
C.纶(guān)巾巷(xiàng)陌剽(piāo)掠船舷(xuán)
D.瓯(ōu)越舸(gě)舰潦(láo)水生肖(xiāo)

















