
 如果结果不匹配,请
如果结果不匹配,请 
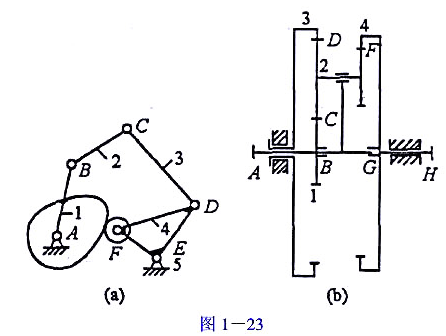
 更多“计算图1-23所示平面机构的自由度,如果有复合铰链,局部自由…”相关的问题
更多“计算图1-23所示平面机构的自由度,如果有复合铰链,局部自由…”相关的问题
第1题
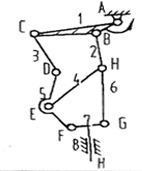
图2-3-10所示平面铰结链杆体系的计算自由度W=(),实际自由度n=(). 图2-3-1
图2-3-10所示平面铰结链杆体系的计算自由度W=(),实际自由度n=().

图2-3-10
第3题
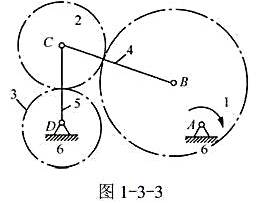
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。 (1)求该机构的
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。
(1)求该机构的自由度(要求有具体计算过程);
(2)用瞬心法求机构在图示位置时的传动比 (列出计算表达方式即可);
(列出计算表达方式即可);
(3)针对图示机构位置,直接在图上将机构中的高副化为低副;
(4)另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
第8题
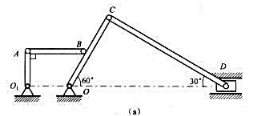
题7-20图(a)所示平面机构,已知CD=40cm,BC=OB,在图示位置时,曲柄O1A垂直于AB,AB平行于O1
题7-20图(a)所示平面机构,已知CD=40cm,BC=OB,在图示位置时,曲柄O1A垂直于AB,AB平行于O1O,试求A,D两点微小位移间的关系。
第10题
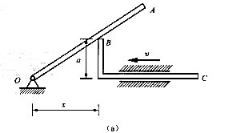
题6-3(a)图所示平面机构,杆OA长为l,由直角推杆BC推动而在图示平面内绕点O转动,假定推杆BC的速
题6-3(a)图所示平面机构,杆OA长为l,由直角推杆BC推动而在图示平面内绕点O转动,假定推杆BC的速
点击查看答案
度为小其弯头高为a。求杆端A的速度的大小(表示为x的函数)。